
- Home
- Produkte
- Bürstenloser Motor
- 45mm bürstenloser DC-Motor mit Außenrotor, Serie FL45BLW
45mm bürstenloser DC-Motor mit Außenrotor, Serie FL45BLW

Einsatz
45mm Bürstenloser DC-Motor mit Außenrotor Serie FL45BLW kann für Roboter, VR-Geräte
, AGV, Drehkreuze, Kaffeemaschinen und so weiter benutzt werden.
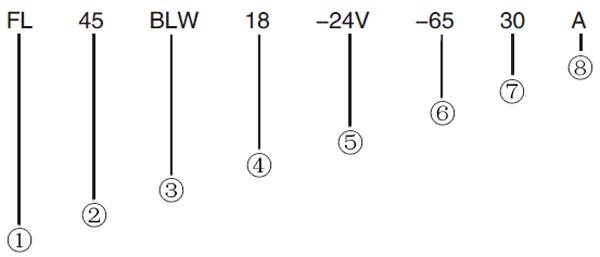 ① Fulling Motor; ② Durchmesser des Motors: 45mm; ③ Bürstenloser Motor mit Außenmotor; ④ Motorlänge: 18mm;
① Fulling Motor; ② Durchmesser des Motors: 45mm; ③ Bürstenloser Motor mit Außenmotor; ④ Motorlänge: 18mm; ⑤ Nennspannung 24V; ⑥ 1% von Leerlaufdrehzahl⑦ Nennleistung: 30W; ⑧ Einwelle(A), Doppelwelle(B)
| Wicklungsanschluss | Star |
| Hall-Winkel | 120° |
| Radialspiel | 0.02mm bei 4N |
| Axialspiel | 0.04mm bei 4N |
| Max. Radialkraft | 28N |
| Max. Axialkraft | 10N |
| Isolationsklasse | Klasse B |
| Durchschlagsfestigkeit | 500V AC für eine Minute |
| Isolierwiderstand | 100MΩ Min., 500V DC |
| Anschluss | Pinzahl | Funktion | Bemerkung |
| CN1 | 1 | Phase U | |
| 2 | Phase V | ||
| 3 | Phase W | ||
| CN2 | 1 | GND | Hall GND |
| 2 | Vcc | Hall Input | |
| 3 | Hall A | +5VDC--+24VDC | |
| 4 | Hall B | ||
| 5 | Hall C |
| Einheit | Toleranz | FL45BLW18-24V-6530A | FL45BLW21-24V-6750A | FL45BLW27-24V-6170A | |
| Polzahl | 16 | 16 | 16 | ||
| Phasenzahl | 3 | 3 | 3 | ||
| Nennspannung | VDC | 24 | 24 | 24 | |
| Leerlaufdrehzahl | RPM | ±10% | 6500 | 6700 | 6100 |
| Leerlaufstrom | A | <0.4A | 0.27 | 0.33 | 0.38 |
| Nenndrehzahl | RPM | ±10% | 5000 | 5260 | 4840 |
| Nennmoment | mN·m | 50 | 84 | 130 | |
| Nennleistung | W | 30 | 50 | 70 | |
| Spitzenmoment | mN·m | 150 | 250 | 390 | |
| Spitzenstrom | A | ±10% | 4.8 | 7.8 | 11 |
| Leitungswiderstand | Ω at 25℃ | ±10% | 1.42Ω | 0.71Ω | 0.56Ω |
| Leitungsinduktivität | mH | ±20% | 0.59 | 0.43 | 0.27 |
| Drehmomentkonstante | mNm/A | ±10% | 35.3 | 34.2 | 37.2 |
| Gegen-EMK-Spannungskonstante | Vrms/KRPM | ±10% | 2.61 | 2.34 | 2.75 |
| Rotorträgheit | g·cm2 | 99 | 135 | 181 | |
| Gewicht | g | 80 | 120 | 150 |
 Der Motor kann nach Ihren Wünschen maßgeschneidert werden.
Der Motor kann nach Ihren Wünschen maßgeschneidert werden.Vorteile
Im Vergleich mit dem Motor mit Innenrotor, hat der flache bürstenlos Motor eine kompakte Bauform und geringere Drehmomentwelligkeit.
Unter der gleichen größe kann der bürstenlose Motor mit Außenrotor ein größeres Drehmoment als BLDC-Motor mit Innenrotor erzeugen.
Anfrageformular
Changzhou Fulling Motor Co., Ltd.



